


협동로봇 적용사례
TM ROBOT 조립 공정
2019.07.12
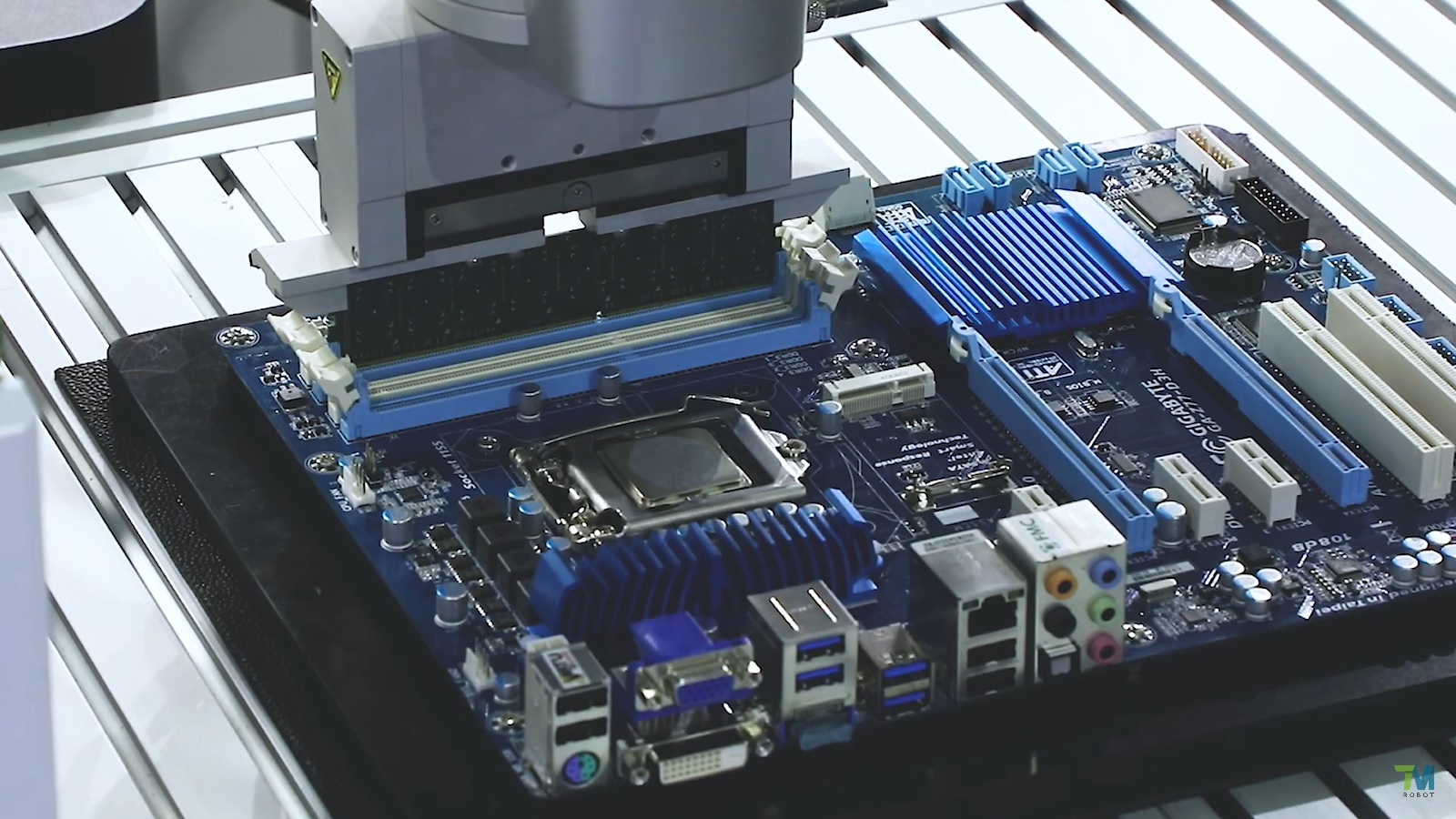
● TM Robot 내장 비전 TM Landmark 기능으로 컴퓨터 RAM 조립 및 해체 작업을 시연하는 동영상입니다.
TM Robot 내장 비전 디자이너는 2D 카메라를 기반으로 합니다.
개체 지향 또는 암 배열 지향의 베이스 시스템에 기반한 배열 모델을 지원합니다.
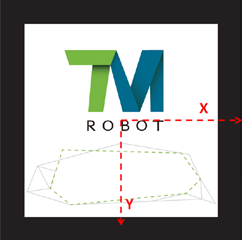
개체 지향 베이스 시스템 작업 공간의 경우 카메라가 생성한 작업 공간이 로봇과 평행을 이루어야 합니다.
이 두 개를 같은 작업 공간에 두지 않으면 영상이 왜곡되고 시각적 식별 오류가 발생할 수 있습니다.
TM vision은 4개의 위치 지정 모드를 제공합니다. TM Landmark, 고정 지점 위치 지정, 서보 제어 및 개체 기반 보정이 있습니다.
{kind=link}
{kind=link}